Based on High Resolution Visuotactile Perception Intelligent Gripper, Achieve Fine Touching Percetion And Stable Manipulation
XENSE GRIPPER
Cross-Platform & Cross-Architecture Compatibility
Supporting both x86 and ARM architectures, Linux and Windows operating systems, with a complete SDK for seamless integration into diverse robotic and automation systems.
Multimodal Tactile Perception Algorithms
Built-in high-precision multimodal algorithms that calculate tangential slip, surface topography, and distributed six-dimensional forces in real time, providing a solid data foundation for fine manipulation and complex interactions.
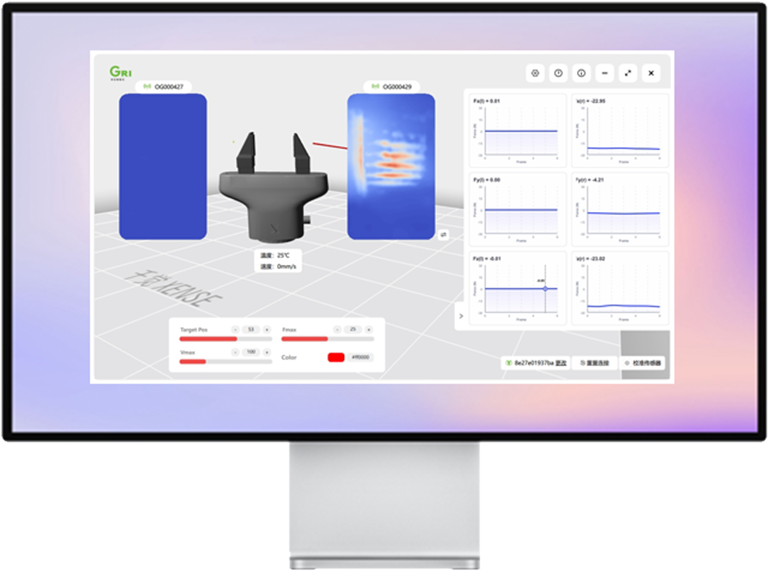
Various Visualization Capabilities
Supporting 3D/2D views and digital twin visualization, it intuitively presents tactile information from macro overviews to micro details, enabling rapid debugging, analysis, and demonstration of system performance.