Multi-Sensor Compatibility Supports curved sensors, flat sensors, and fingertip sensors, covering diverse tactile perception requirements across scenarios.
Cross-Architecture & Cross-Platform Support Compatible with x86/ARM architectures and Linux/Windows OS, equipped with SDK to achieve seamless hardware-software adaptation.
Integrated Multimodal Perception Algorithms Precisely resolves tangential slip, surface topography, and distributed six-axis forces, enabling holistic complex tactile analysis.
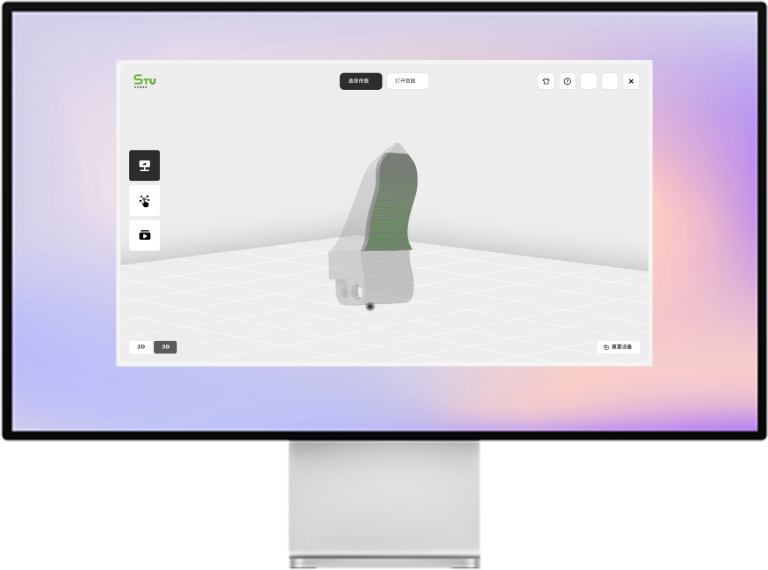
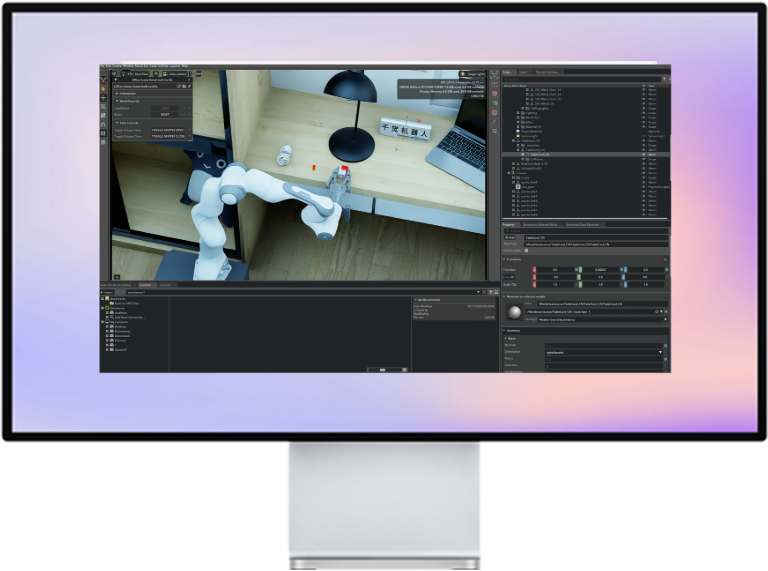
Multimodal Visualization Tools Enables 3D, 2D, and digital twin visualizations for intuitive tactile data interpretation.
Data Acquisition & Analytics Records raw sensory signals for subsequent analysis, providing actionable data insights.