首页
产品
夸克 N1触觉传感器
光子触觉传感器
夸克 W1触觉传感器
GS-PS
精灵触觉传感器
极光 Lite智能触觉夹爪
XTAC UMI G1
行业应用
新闻动态
关于我们
招贤纳士
支持
软件中心
常见问题
联系我们
中文/
EN
Menu
首页
产品
传感器
夹爪型
指尖型
夹爪
夹爪
穿戴式触觉数采设备
穿戴式视触觉多模态数据采集夹⽖
行业应用
新闻动态
公司动态
关于我们
招贤纳士
支持
软件中心
常见问题
联系我们
语言
中文
EN
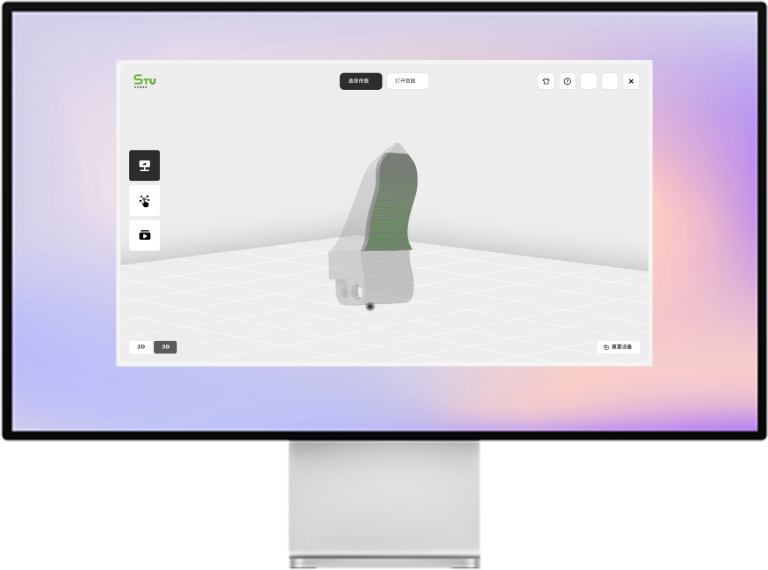
多模态触觉可视化软件
软硬协同的设计,迅速洞察并分析复杂的触觉数据
XENSE STUDIO
兼容多种传感器
支持曲面传感器、平面传感器、指尖传感器,满足不同场景下的触觉感知需求。
跨架构/跨平台支持
兼容x86和ARM架构支持Linux和Windows操作系统,提供SDK,确保在不同硬件和软件环境下的无缝适配。
集成多模态感知算法
精准解算切向滑移表面形貌和分布式六维力,为复杂触觉分析提供全面数据支持。
多种可视化功能
提供三维、二维、数字孪生等丰富的可视化方式,帮助用户直观理解触觉数据。
数据采集和分析
支持录制传感信号,便于用户进行二次分析,挖掘数据的深层次价值。
下载软件
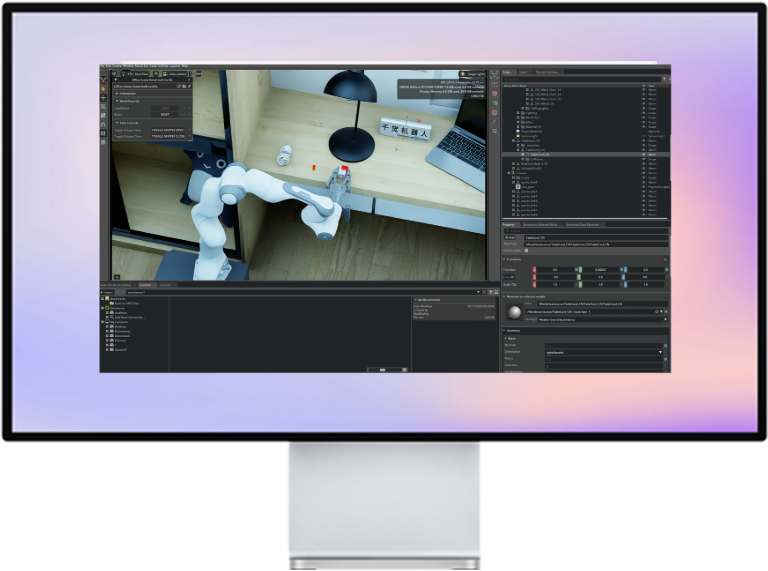
XENSE SIM
支持动力学仿真,形变仿真
适配 Isaac Sim / Mujoco 仿真平台
快速生成海量仿真数据
下载软件
XENSE GRIPPER
跨平台·跨架构适配
同时兼容 x86 与 ARM 架构,支持 Linux 与 Windows 操作系统,并提供完整 SDK,轻松集成至各类机器人与自动化系统。
多模态触觉感知算法
内置高精度多模态算法,可实时解算切向滑移、接触表面形貌及分布式六维力,为精细操作与复杂交互提供坚实的数据基础。
丰富的可视化能力
支持三维/二维视图及数字孪生可视化,从宏观到细节直观呈现触觉信息,帮助快速调试、分析与展示系统效果。
下载软件
扫码咨询购买